SYSTEM AND METHOD OF USE OF GYROSCOPIC FORCES ON ANIMAL EQUILIBRIUM
Patent Number: US 9282721 Grant Date: 2016-03-15 Filing Date: 2012-12-14
Overview
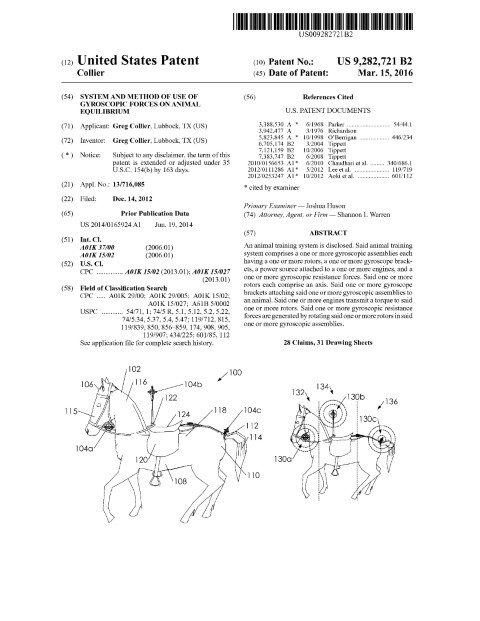
This patent describes an electromechanical system that harnesses gyroscopic angular momentum to influence and stabilize animal equilibrium. Filed December 14, 2012 and granted March 15, 2016, the disclosure — credited to inventors based in Lubbock, TX — outlines modular gyroscopic assemblies that mount to a bridle, saddle (horn), or tail strap to apply controlled pitch, roll and yaw forces. The assemblies use concentric external rotors that spin around internal rails, enabling tri-axial gyroscopic effects; magnetic or ball bearings and motor-driven wheel assemblies provide low-friction rotation while a central power source (battery, solar or combustion) and controller tune torque and duration. The design accommodates aesthetic casings and practical mounting hardware so the system integrates with common horse tack and can simulate a rider’s center of mass or selectively destabilize balance for training purposes. Remote control and distributed power options are described for field use.
This claim portfolio demonstrates rigorous technical drafting — detailing mechanical interfaces, magnetic bearing gaps, multi-axis geometry, and power/control architectures — positioning the firm’s work at the intersection of animal training and precision control hardware.
Key Features
- Tri-axial gyroscopic assemblies with rotor-on-rail architecture
- Magnetic or ball bearing options and motor-driven wheel drives
- Mounts to bridle, saddle horn, and tail strap; remote/controller operation
- Battery, solar, or combustion power configurations
The invention bridges established gyroscopic control concepts with practical animal training and stabilization, offering new avenues for safety and performance in equine and livestock applications.
Invention Details
Abstract: An animal training system is disclosed. Said animal training system comprises a one or more gyroscopic assemblies each having a one or more rotors, a one or more gyroscope brackets, a power source attached to a one or more engines, and a one or more gyroscopic resistance forces. Said one or more rotors each comprise an axis. Said one or more gyroscope brackets attaching said one or more gyroscopic assemblies to an animal. Said one or more engines transmit a torque to said one or more rotors. Said one or more gyroscopic resistance forces are generated by rotating said one or more rotors in said one or more gyroscopic assemblies.
Background: BACKGROUND (1) This disclosure relates generally to a system and method of use of gyroscopic forces on animal equilibrium. Animal training systems are well known and the mechanics and use of gyroscopic forces are also well known. However, the combination and use of these arts are as yet unexplored as herein disclosed. (2) An example of an animal training system can be found in U.S. Pat. No. 3,942,477. In that patent application, Mr. Richardson quoted Mr. John Solomon Rarey (a horse trainer of the 19.sup.th century) who said: “The horse is so constituted by nature that he will not offer resistance to any demand made of him which he fully comprehends … . That we can, in compliance with the laws of his nature, by which he examines all things new to him, take any object, however frightful, around, or on him that does not inflict pain, without causing him to fear.” (3) None of the prior inventions and patents, taken either singularly or in combination, is seen to describe the instant disclosure as claimed. Thus, a system and method of use of gyroscopic forces on animal equilibrium is desirable. SUMMARY (4) An animal training system, an animal training method and an animal stabilization system are disclosed. (5) Said animal training system comprises a one or more gyroscopic assemblies each having a one or more rotors, a one or more gyroscope brackets, a power source attached to a one or more engines, and a one or more angular momentum forces. Said one or more rotors each comprise an axis. Said one or more gyroscope brackets attaching said one or more gyroscopic assemblies to an animal. Said one or more engines transmit a torque to said one or more rotors. Said one or more angular momentum forces are generated by rotating said one or more rotors in said one or more gyroscopic assemblies. (6) Said animal training method comprises: attaching one or more gyroscopic assemblies each having a one or more rotors to an animal; rotating said one or more external rotors with one or more engines; generating a one or more angular momentum forces with said one or more one or more external rotors; directing said one or more angular momentum forces at one or more parts of a body of said animal; and training said animal. (7) Said animal stabilization system comprises a one or more gyroscopic assemblies each having a one or more rotors, a one or more gyroscope brackets, a power source attached to a one or more engines, and a one or more angular momentum forces. Said one or more rotors each comprise an axis. Said one or more gyroscope brackets attaching said one or more gyroscopic assemblies to an animal. Said one or more engines transmit a torque to said one or more rotors. Said one or more angular momentum forces are generated by rotating said one or more rotors in said one or more gyroscopic assemblies.
Patent Document
Related: Agriculture | Mechanical Engineering | Robotics & Automation | Electrical Engineering | Livestock | Testing And Measurement | Lubbock, Texas | Shannon Warren, Patent Attorney